人工智能(AI)作为工业过程中先进技术的重要组成部分经历了巨大的发展。在计算机科学中,人工智能意味着智能体的自主学习能力的提升。多智能体系统(MAS)因其应用的广泛性受到了极大关注,其编队控制是常见的协同控制任务之一,例如无人船系统、无人艇系统、卫星系统、多机械臂系统等。
近日,我校自动化学院池荣虎教授团队在多智能体的编队控制取得新进展,团队相关工作以“Adjacent-Agent Dynamic Linearization-Based Iterative Learning Formation Control”(DOI:10.1109/TCYB.2019.2899654)为题发表在IEEE Transaction on Cybernetics上,该论文以青岛科技大学为唯一通讯单位,池荣虎教授为第一作者,自动化学院惠宇博士为第二作者。(IEEE Transactions on Cybernetics期刊创刊于1960年,主要报道人工智能、机器学习、控制论和机器人技术等领域的最新研究进展,及其在控制论领域的推广研究。在前任主编王钧教授的努力下,该期刊当前影响因子为10.387,属于中科院SCI一区TOP期刊,是系统与控制方向与计算机控制论双学科的最顶级期刊)。
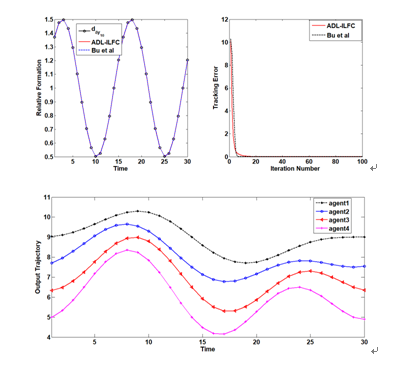
课题组针对离散时间非线性非仿射多智能体系统的编队控制问题,提出了一种新的基于临近智能体动态线性化的迭代学习控制(ADL-ILFC)方法。首先,将具有信息交换的两个智能体分配为父智能体和子智能体,并建立了两个智能体间的动态关联关系。然后,通过运用从父智能体获得的信息,提出了子智能体的ADL-ILFC方法,由父智能体到子智能体以固定通讯延迟方式依次控制。理论分析和仿真验证了ADL-ILFC方法的有效性。所提出方法的主要特点在于引入了3维学习机制,控制机制可充分利用时间维度、迭代维度、空间维度等更多的控制信息进行更新。此外,所提出方法是数据驱动的控制策略,不需要建立非线性非仿射智能体系统的物理模型。
该工作得到了国家自然科学基金、山东省泰山学者人才工程、山东省重点研发计划、山东省自然科学基金等项目的支持。

